Sensors, Free Full-Text
Por um escritor misterioso
Last updated 14 maio 2024
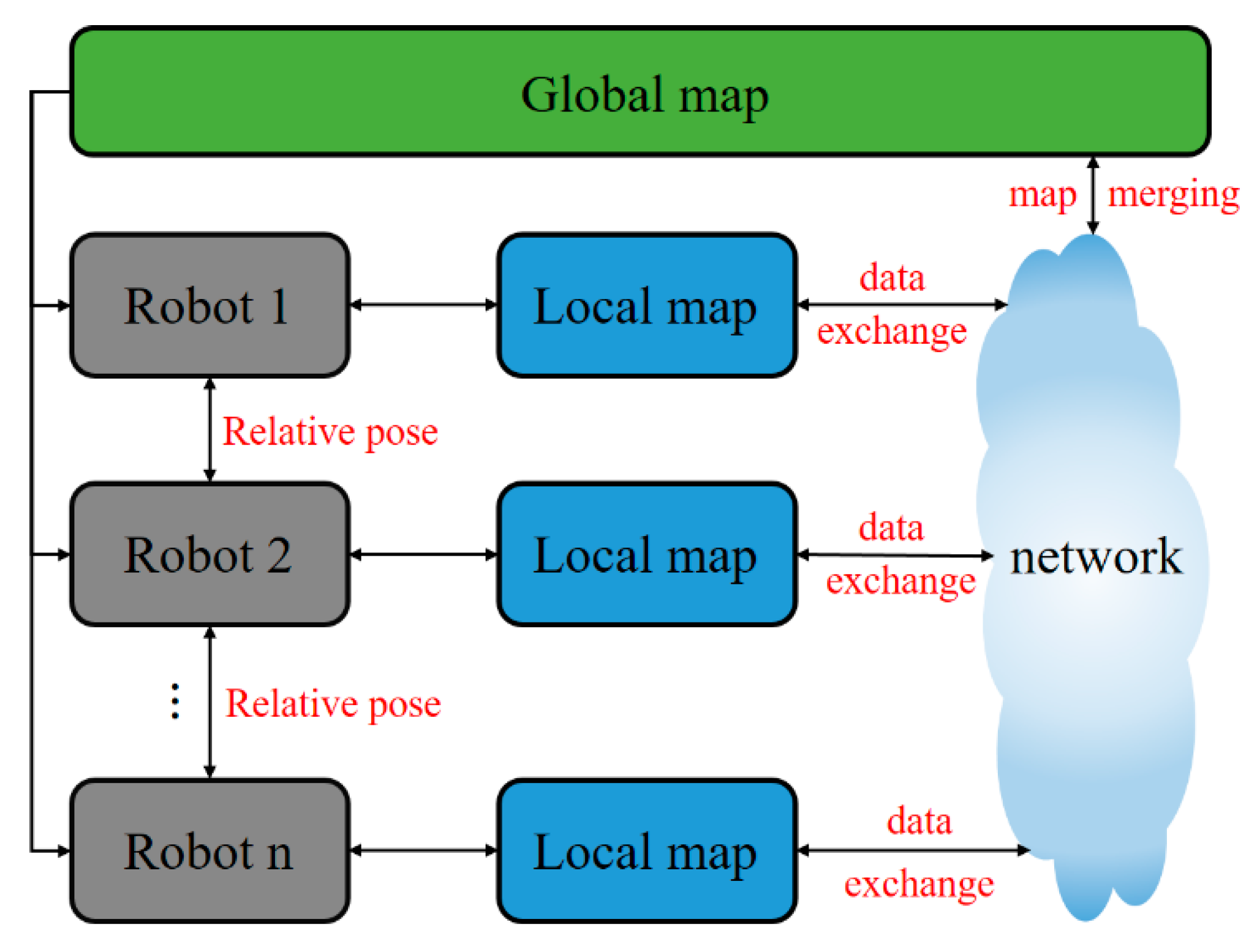
When multiple robots are involved in the process of simultaneous localization and mapping (SLAM), a global map should be constructed by merging the local maps built by individual robots, so as to provide a better representation of the environment. Hence, the map-merging methods play a crucial rule in multi-robot systems and determine the performance of multi-robot SLAM. This paper looks into the key problem of map merging for multiple-ground-robot SLAM and reviews the typical map-merging methods for several important types of maps in SLAM applications: occupancy grid maps, feature-based maps, and topological maps. These map-merging approaches are classified based on their working mechanism or the type of features they deal with. The concepts and characteristics of these map-merging methods are elaborated in this review. The contents summarized in this paper provide insights and guidance for future multiple-ground-robot SLAM solutions.

Sensors for Pressure Mapping and Force Measurement

Freestyle Libre Troubleshooting: Sensor Error Reading Not

Bambu Lab A1 mini, Desktop 3D Printer
Sensors, Free Full-Text

$15 CGM Trial Offer - FreeStyle Libre 2
Sensors, Free Full-Text

BOSCH Professional GIS 1000 C Thermo Bluetooth Thermal Camera
Sensors, Free Full-Text

Angewandte Chemie International Edition: Early View
Download Files
Recomendado para você
-
 ROBLOX - MOSTRANDO MINHA CASA (BLOXBURG)14 maio 2024
ROBLOX - MOSTRANDO MINHA CASA (BLOXBURG)14 maio 2024 -
 MINECRAFT #10 DESAFIO - QUEM DOMESTICAR MAIS LOBOS VENCE14 maio 2024
MINECRAFT #10 DESAFIO - QUEM DOMESTICAR MAIS LOBOS VENCE14 maio 2024 -
 MINECRAFT - CONSTRUÍNDO UMA PONTE DE DIORITO. MUITO14 maio 2024
MINECRAFT - CONSTRUÍNDO UMA PONTE DE DIORITO. MUITO14 maio 2024 -
 Duda Ferrão Games14 maio 2024
Duda Ferrão Games14 maio 2024 -
 MINECRAFT #17 CONSTRUÍMOS UMA CIDADE SEM MODS. TOUR PELA MINHA14 maio 2024
MINECRAFT #17 CONSTRUÍMOS UMA CIDADE SEM MODS. TOUR PELA MINHA14 maio 2024 -
 Notícias - Plataforma das Instituições Comunitárias14 maio 2024
Notícias - Plataforma das Instituições Comunitárias14 maio 2024 -
 Foods, Free Full-Text14 maio 2024
Foods, Free Full-Text14 maio 2024 -
 MINECRAFT#21 - PERDEMOS TUDO! A NOSSA CIDADE SUMIU.14 maio 2024
MINECRAFT#21 - PERDEMOS TUDO! A NOSSA CIDADE SUMIU.14 maio 2024 -
Dota 2 - Available now to all Battle Pass owners who reach level14 maio 2024
-
:strip_icc()/i.s3.glbimg.com/v1/AUTH_59edd422c0c84a879bd37670ae4f538a/internal_photos/bs/2016/x/T/D8BVynSQuC0e4Kh1qreQ/29615120441-8d68294883-k.jpg) UnB divulga lista de aprovados no PAS 2018; veja nomes e14 maio 2024
UnB divulga lista de aprovados no PAS 2018; veja nomes e14 maio 2024

você pode gostar
-
 Moltres - 012/078 - Holo Rare - Pokemon GO - NM/M - New14 maio 2024
Moltres - 012/078 - Holo Rare - Pokemon GO - NM/M - New14 maio 2024 -
 Renan Camargo Design Gráfico e Fotografia - Copa Paulista 202214 maio 2024
Renan Camargo Design Gráfico e Fotografia - Copa Paulista 202214 maio 2024 -
 Slime Licker - Sour Rolling Liquid Candy - 4-Pack of Blue Razz Flavor - 2 ounces each Bottle - Toxic Waste - TikTok Challenge Trend Blue-Raspberry 2 Fl Oz (Pack of 4)14 maio 2024
Slime Licker - Sour Rolling Liquid Candy - 4-Pack of Blue Razz Flavor - 2 ounces each Bottle - Toxic Waste - TikTok Challenge Trend Blue-Raspberry 2 Fl Oz (Pack of 4)14 maio 2024 -
 Prince of Persia: Warrior Within - IGN14 maio 2024
Prince of Persia: Warrior Within - IGN14 maio 2024 -
 strength is for nerds : r/Eldenring14 maio 2024
strength is for nerds : r/Eldenring14 maio 2024 -
 Video Of The Week: no.1 – Powerwolf Blessed And Possessed14 maio 2024
Video Of The Week: no.1 – Powerwolf Blessed And Possessed14 maio 2024 -
 Aí Vêm os Cadetes (1959) - IMDb14 maio 2024
Aí Vêm os Cadetes (1959) - IMDb14 maio 2024 -
Download Spider-Man Battle for New York 1.3.2 APK For Android14 maio 2024
-
 Jogo Naruto Shippuden: Ultimate Ninja Storm 2 - Xbox 25 Dígitos14 maio 2024
Jogo Naruto Shippuden: Ultimate Ninja Storm 2 - Xbox 25 Dígitos14 maio 2024 -
 PRIMEIRA VEZ NO NOVO UPDATE 20 do BLOX FRUITS!! *MUDOU TUDO*14 maio 2024
PRIMEIRA VEZ NO NOVO UPDATE 20 do BLOX FRUITS!! *MUDOU TUDO*14 maio 2024
